Standalone Intelligent Motion Control Unit
Highly versatile, complete and integrate assembly of modules for motion control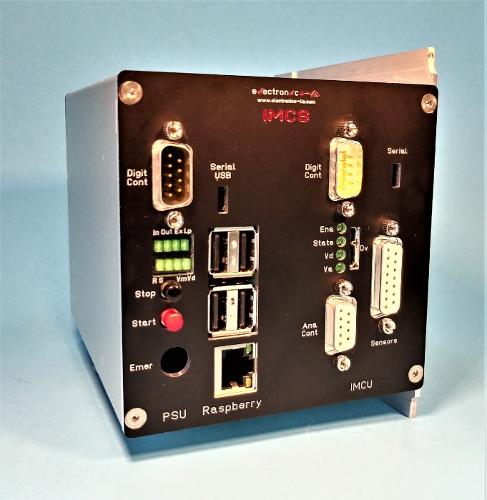
Description
Standalone version of the IMCU including: 1. power supply (DC/DC converters), global protection and management 2. power amplifier directly controlled by DSP providing a large configuration, protection and measurement possibility 3. Optimal control in relation with EMC and efficiency 4. Specific for each application mezzanine board to interface applied position sensor devices s LVDT, resolver, incremental etc. 5. Possible implementation on the CAN bus 6. Internet/WiFi/Bluetooth user's interface based on the Raspberry module 7. Implemented open source firmware 8. Possibilities to direct programing implemented DSP from Simulink@ model
- Automatic piloting equipment
- Versatile motion control unit
Similar products

BOSCH INDUSTRIEKESSEL GMBH - INDUSTRIAL BOILERS
Germany

— Modular complete solution with cost advantage, for all single-flame-tube hot water and heating boilers — Intelligent sequence control for up to four boilers — Intuitive operation via colour touch display and function keys for quick access — Pre-configured and completely wired for quick commissioning — Integrated power supply in the compact control cabinet, e.g. for burner and pumps — Compatible with all common automation system protocols — Optional remote access via MEC Remote for maximum availability

REA ELEKTRONIK GMBH
Germany
Ready for world wide use — Full Unicode support: all global languages can be printed for companies with international customers — Support of all True Type Fonts (TTFs): maximum design flexibility for your print — XML-based data structure and communication protocol: globally used standard for data compatibility — Sturdy and high-quality stainless-steel casing designed for daily work in rough industry environments — 24V power supply: for direct integration into machines and systems
Request for quotes
Create one request and get multiple quotes form verified suppliers.
- Only relevant suppliers
- Data privacy compliant
- 100% free